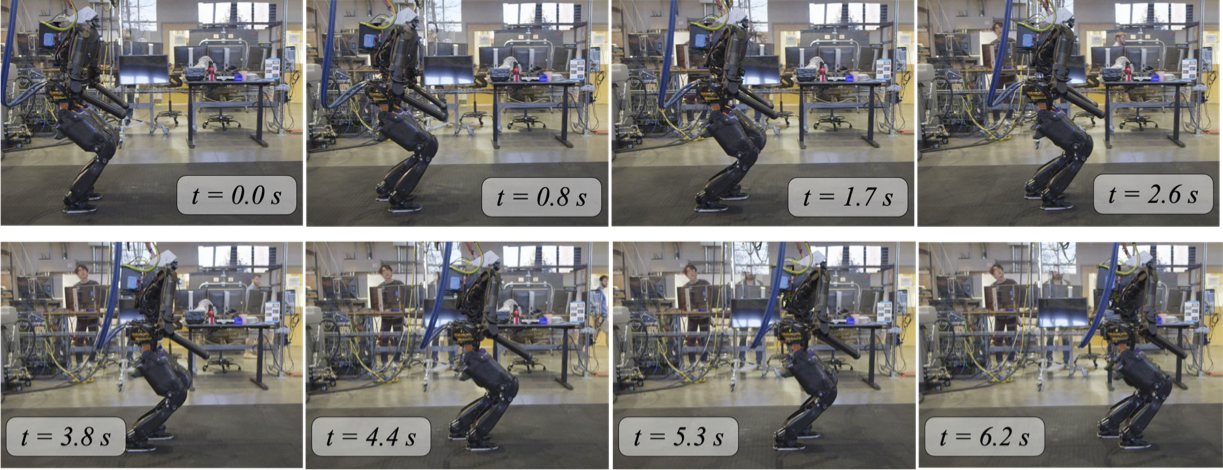
The hydraulic humanoid Nadia walking forward over multiple steps using our convex MPC formulation with linear time-invariant dynamics constraints. The gait has a stride length of 30 cm, a swing phase of 0.6 s and a double support phase of 0.3 s.
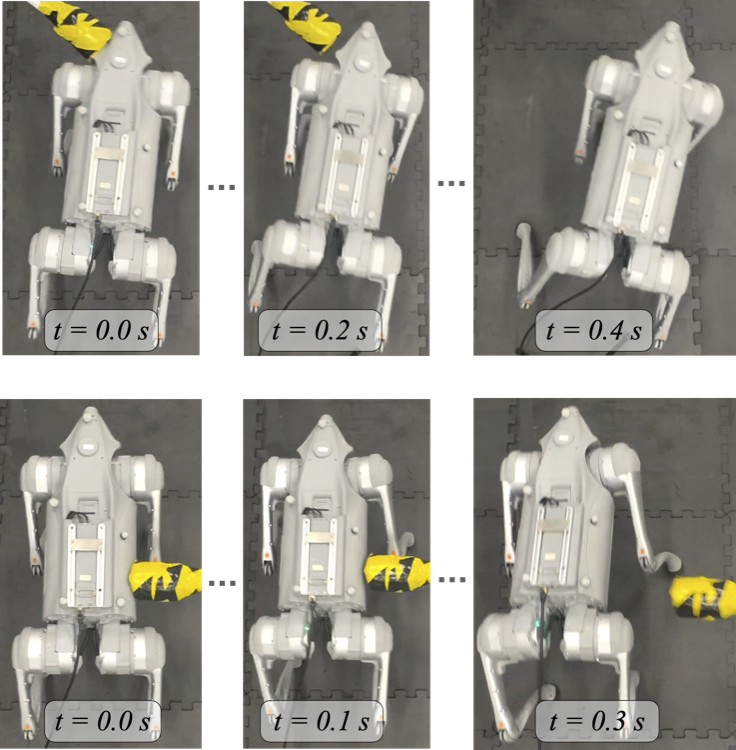
Top-down view of two perturbations applied to the Unitree Go2 while stepping in place. The robot maintains contact with the ground without slipping and return to its original location.
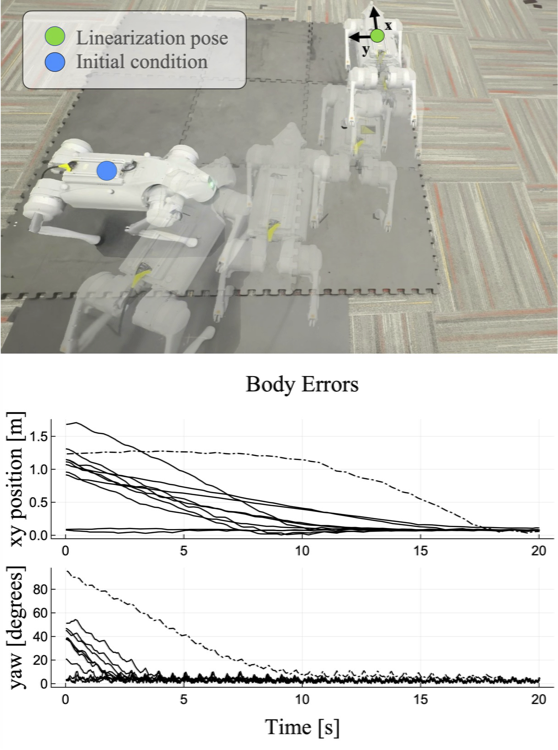
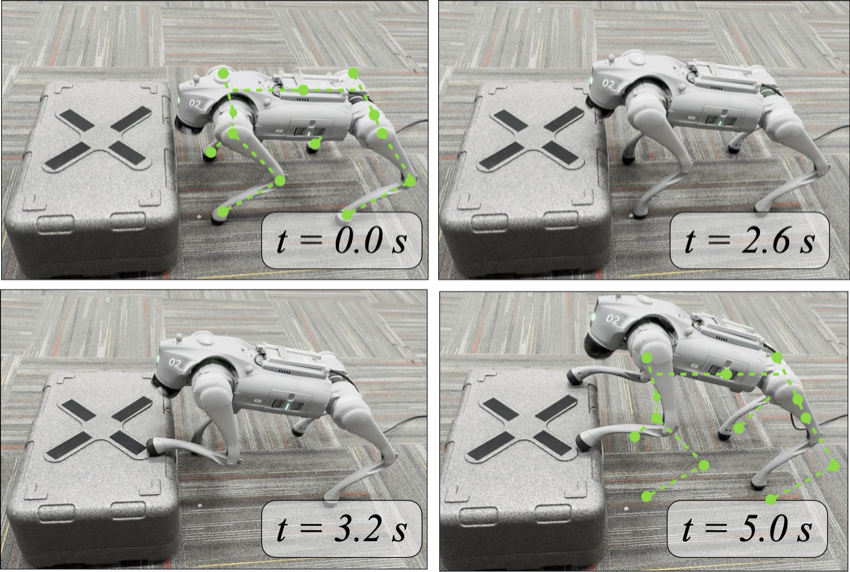
A Unitree Go2 robot starts from 10 initial conditions with yaw from 5 to 90° and displacements from 0.1 to 1.7 m. Transparent overlays show keyframes starting with 90° yaw and 1.3 m displacement. Our controller is able to return to the initial position without assistance from a footstep planner.